|
The Shapes Library
Game Physics with Bespoke Code
|
Loading...
Searching...
No Matches
|
The Shapes Library
Game Physics with Bespoke Code
|
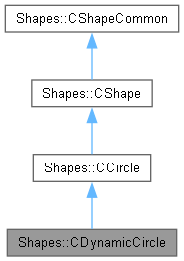
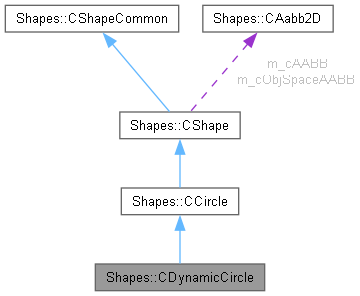
Dynamic circle. More...
#include <DynamicCircle.h>
Public Member Functions | |
| CDynamicCircle (const CDynamicCircleDesc &) | |
| Constructor. | |
| void | move () |
| Move using Euler integration. | |
| const bool | AABBCollide (CDynamicCircle *) const |
| Collide detection using AABBs. | |
| void | CollisionResponse (const CContactDesc &) |
| Collision response. | |
| const Vector2 | GetVel () const |
| Get velocity. | |
| void | SetVel (const Vector2 &) |
| Set velocity. | |
 Public Member Functions inherited from Shapes::CCircle Public Member Functions inherited from Shapes::CCircle | |
| CCircle (const CCircleDesc &) | |
| Constructor. | |
| const bool | CollisionDetected (CContactDesc &) const |
| Collision detection. | |
| const bool | PtInCircle (const Vector2 &) const |
| Point in circle test. | |
| const Vector2 | ClosestPt (const Vector2 &) const |
| Closest point on circle. | |
| const bool | Tangents (const Vector2 &, Vector2 &, Vector2 &) const |
| Tangents through external point. | |
| const bool | Tangents (const CCircle *, CLineSegDesc &, CLineSegDesc &) const |
| Common tangents. | |
| const bool | Tangent (const CCircle *, CLineSegDesc &) const |
| Common tangent. | |
| const float | GetRadius () const |
| Get radius. | |
| Public Member Functions inherited from Shapes::CShape | |
| CShape (const CShapeDesc &) | |
| Constructor. | |
| virtual | ~CShape () |
| Destructor. | |
| const eShape | GetShapeType () const |
| Get shape type. | |
| const eMotion | GetMotionType () const |
| Get motion type. | |
| const CAabb2D & | GetAABB () const |
| Get AABB. | |
| const bool | GetSensor () const |
| Is this shape a sensor? | |
| const Vector2 & | GetPos () const |
| Get position. | |
| void | SetPos (const Vector2 &) |
| Set position. | |
| void | SetAABBPoint (const Vector2 &) |
| Set AABB point. | |
| void | AddAABBPoint (const Vector2 &) |
| Add AABB point. | |
| void | SetCanCollide (bool=true) |
| Turn collisions on or off. | |
| const bool | GetCanCollide () const |
| Get whether shape can collide. | |
| const bool | GetRotating () const |
| Get whether rotating. | |
| void | SetRotating (bool) |
| Start or stop rotating. | |
| const float | GetOrientation () const |
| Get orientation. | |
| void | SetOrientation (float) |
| Set orientation. | |
| const float | GetRotSpeed () const |
| Get rotation speed. | |
| void | SetRotSpeed (float) |
| Set rotation speed. | |
| const Vector2 & | GetRotCenter () const |
| Get rotation speed. | |
| void | SetRotCenter (const Vector2 &) |
| Set center of rotation. | |
| const float | GetElasticity () const |
| Get elasticity. | |
| void * | GetUserPtr () const |
| Get user pointer. | |
| void | SetUserPtr (void *) |
| Set user pointer. | |
| virtual void | Rotate (const Vector2 &, float) |
| Rotate. | |
| virtual void | Reset () |
| Reset orientation. | |
Private Member Functions | |
| void | CollisionResponseStatic (const CContactDesc &) |
| Collision response for static shape. | |
| void | CollisionResponseKinematic (const CContactDesc &) |
| Collision response for kinematic shape. | |
| void | CollisionResponseDynamic (const CContactDesc &) |
| Collision response for dynamic shape. | |
Private Attributes | |
| Vector2 | m_vVel |
| Velocity. Speed is measured in pixels per second. | |
| float | m_fMass = 0.0f |
| Mass. | |
Additional Inherited Members | |
| Protected Attributes inherited from Shapes::CCircle | |
| float | m_fRadius = 0.0f |
| Radius. | |
| float | m_fRadiusSq = 0.0f |
| Radius squared, for fast distance calc. | |
| Protected Attributes inherited from Shapes::CShape | |
| eShape | m_eShapeType = eShape::Unknown |
| Type of shape. | |
| eMotion | m_eMotionType = eMotion::Static |
| How shape moves. | |
| float | m_fElasticity = 1.0f |
| Elasticity, aka restitution, bounciness. | |
| bool | m_bIsSensor = false |
| Sensor only, no rebound on collision. | |
| CAabb2D | m_cAABB |
| Axially aligned bounding box in World Space. | |
| bool | m_bCanCollide = true |
| Can collide with other shapes. | |
| float | m_fOrientation = 0.0f |
| Orientation angle. | |
| void * | m_pUser |
| Spare pointer for user in case they might need one. | |
| Vector2 | m_vRotCenter |
| Center of rotation. | |
| float | m_fRotSpeed = 0.0f |
| Rotation speed. | |
| bool | m_bRotating = false |
| Whether rotating. | |
| Static Protected Attributes inherited from Shapes::CShapeCommon | |
| static float | m_fGravity = 0.0f |
| Gravitational constant. | |
| static float | m_fTimeStep = 0.0f |
| Time step per animation frame (fictional). | |
A dynamic circle is a circle shape that moves and can collide with static, kinematic, and dynamic shapes.
| CDynamicCircle::CDynamicCircle | ( | const CDynamicCircleDesc & | r | ) |
Constructs a dynamic circle described by a dynamic circle descriptor.
| r | Dynamic circle descriptor. |

| const bool CDynamicCircle::AABBCollide | ( | CDynamicCircle * | pCirc | ) | const |
Does the AABB for this dynamic circle overlap the AABB for another dynamic circle?
| pCirc | Pointer to a dynamic circle. |
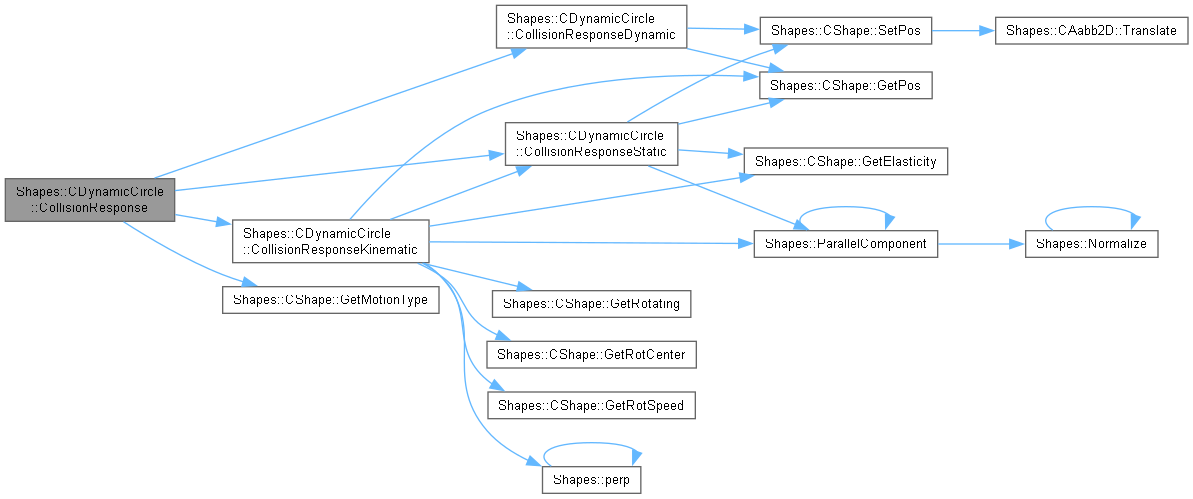
| void CDynamicCircle::CollisionResponse | ( | const CContactDesc & | cd | ) |
Collision response for a dynamic circle colliding with a shape.
| cd | Contact descriptor which has been filled in by collision detection. |
|
private |
Collision response for a dynamic circle colliding with a dynamic shape.
| cd | Contact descriptor which has been filled in by collision detection. |


|
private |
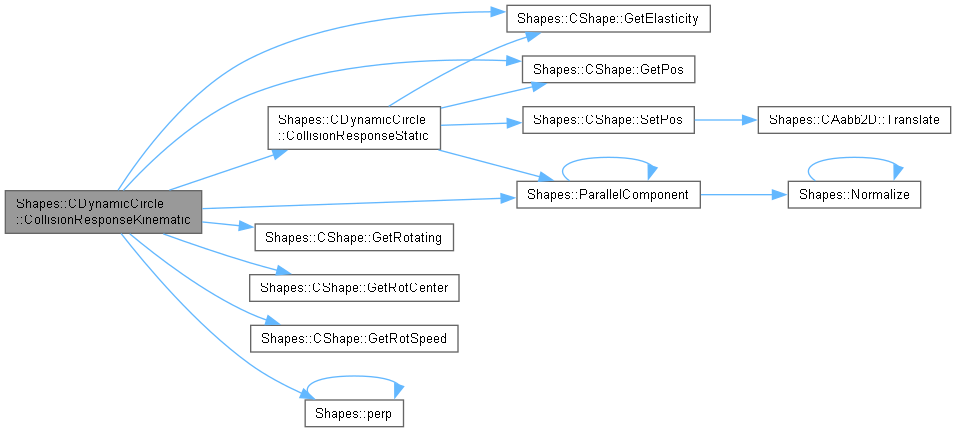
Collision response for a dynamic circle colliding with a kinematic shape. This circle's velocity is affected by the kinematic shape's rotation. This code assumes that all elasticities are less than unity.
| cd | Contact descriptor that has been filled in by collision detection. |

|
private |
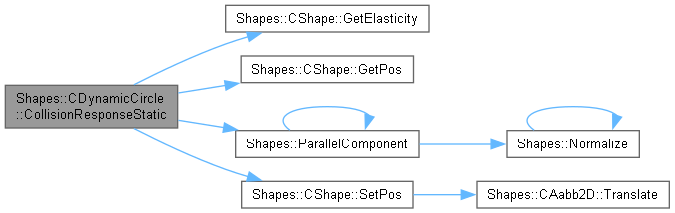
Collision response for a dynamic circle colliding with a static shape.
| cd | Contact descriptor which has been filled in by collision detection. |

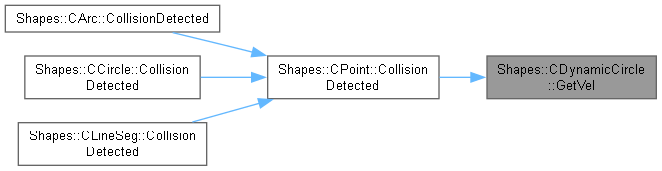
| const Vector2 CDynamicCircle::GetVel | ( | ) | const |
Reader function for the velocity.
|
virtual |
Move the shape using Euler integration, depending on the physics time step and the gravity constant.
Reimplemented from Shapes::CShape.

| void CDynamicCircle::SetVel | ( | const Vector2 & | v | ) |
Set the velocity to a new value.
| v | New velocity. |